

杏彩体育:机器人的关节-精密执行器
来源:杏彩体育APP下载 作者:杏彩体育官网入口机器人通常由执行机构、驱动系统、控制系统、和传感系统四部分组成。机器人执行机构是机器人赖以完成工
热线电话: 0574-62199599
产品视频
产品明细
机器人通常由执行机构、驱动系统、控制系统、和传感系统四部分组成。机器人执行机构是机器人赖以完成工作任务的实体,通常由一系列连杆、关节或其他形式的运动副组成。工业机器人按臂部的运动形式分为四种:直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。这些运动都需要执行器来完成。
执行器可以根据运动分为两类:旋转执行器和线)旋转执行器会将某物旋转一定的角度,可以是有限的也可以是无限的。旋转执行器的一个典型例子是电动机,它是一种将电信号转换成其轴的旋转运动的执行器, 当电流施加到基本电机时,电机旋转。将电机直接连接到负载上,创建了一个直接驱动的旋转执行器,许多旋转执行器与用作机械杠杆的机构相结合(优点)以降低旋转速度并增加扭矩,如果最终结果是旋转,该组件的输出仍然是旋转执行器。 2)旋转执行器还连接到将旋转运动转换成来回运动的机构,该机构被称为线性执行器。线性执行器本质上是沿着直线移动物体,通常是来回移动。这些机构包括:滚珠/滚柱丝杠、皮带和滑轮、齿条和小齿轮。滚珠丝杠和滚柱丝杠通常用于将旋转运动转换成精确的直线运动,例如在加工中心。齿条和小齿轮通常增加扭矩并降低旋转运动的速度,它们也可以与将旋转运动转化为线性运动的机构结合使用。
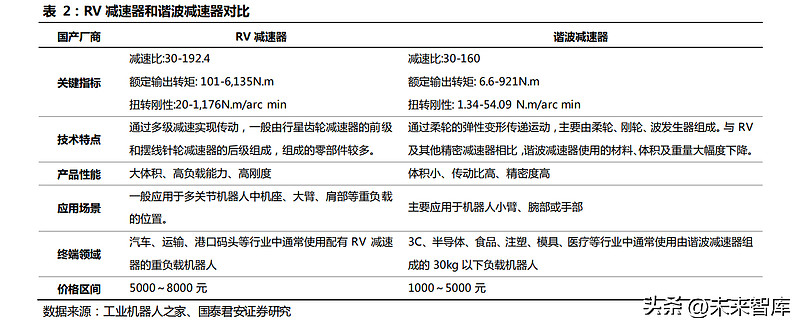
旋转执行器主要包括 RV 减速器和谐波减速器: 1)RV 减速器:RV 通常是用摆线针轮,用于转矩大的机器人关节,主要用于 20 公斤到几百公斤负载的机器人,一二三轴都是用 RV。RV 长时间使用后的精度保持度高于谐波。由于 RV 的零部件更为复杂,承载强度更高且制造难度比谐波大,因此产线)谐波减速器:谐波过去式以渐开线齿形为主,现在有部分厂家使用了双圆弧齿形。谐波可负载的转矩小,通常用于 20 公斤以下的机械臂。谐波里的一种关键齿轮是柔性的,它需要反复的高速变形,所以它比较脆弱,承载力和寿命弱于 RV。
丝杠是将旋转运动变成直线运动的传动副零件。根据摩擦特性可分为滑动丝杠、滚动丝杠及静压丝杠,其中滚动丝杠根据载荷传递元件的区别,分为滚珠丝杠和行星滚柱丝杠: 1)滚珠丝杠:是传动机械中应用最为普遍、精度最高的传动装置。具有摩擦阻力小、 传动效率高、定位精度高、刚性高、微进给、高速进给、无侧隙、使用寿命长等特性。 2)滚柱丝杠:相比滚珠丝杠,滚柱丝杠具备高负载、高刚度和长寿命的优势。行星滚柱丝杠成本高,集中在高端或特殊需求,应用规模不大,主要是对液压执行器的替代。 3)梯形丝杠:和滚珠丝杠的运动原理相同,不同之处在于,梯形丝杠里没有滚珠, 螺母和丝杠轴之间的运动完全靠机械接触产生滑动,是滑动摩擦,所以梯形丝杠也叫滑动丝杠。滚珠丝杠是滚动摩擦,梯形丝杠是滑动摩擦,滚动摩擦的摩擦系数远远低于滑动摩擦系数,大多数滚珠丝杠的传动效率高达 90%,有的达到 95%以上, 大多数梯形丝杠的传动效率低于 70%。
机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况。主要包括:自由度、额定负载、工作空间、工作精度。其他参数还有:工作速度、控制方式、驱动方式、安装方式、动力源容量、本体质量、环境参数等。
1)自由度:工业机器人的自由度是根据其用途设计的。机器人的自由度反映机器人动作的灵活性,自由度越多,机器人就越能接近人手的动作机能,通用性越好,可用直线移动、摆动或者旋转动作的数目来表示。自由度越多,结构越复杂,对机器人的整体要求越高。工业机器人把机械臂上每一个关节都当作一个独立的伺服机构, 即每个轴对应一个伺服器,每个伺服器通过总线控制,由统一控制协调工作。
2)额定负载:也称有效负荷,是指正常作业条件下,工业机器人在规定性能范围内, 手腕末端所能承受的最大载荷。工业机器人负载范围较大,一般为 0.5~2300kg。 当负载较大时,提高电机的功率不划算,可以在适宜的速度范围内,通过减速器来提高输出扭矩。伺服电机在低频转速下容易出现发热和低频振动,对于长时间工作的工业机器人不利于确保其精确可靠的运行。使伺服电机在合适的速度下运转,并精确地将转速降到工业机器人各部位需要的速度,提高机械刚性的同时, 输出更大的力矩。
3)工作精度:重复定位精度取决于机器人关节减速机及传动装置的精度,绝对精度取决于机器人控制算法、编码器精度、减速及传动装置精度等的综合表现。一般来说,机器人的重复精度高于绝对精度。要提高机器人的绝对精度,需要进行高精度标定。标定可以分为:一级未驱动器与关节传感器的标定,即确定关节位移传感器产生的信号与实际关节位移之间的关系;二级在一级基础上,加入机器人几何参数的标定,针对各组成连杆的运动变量误差和各连杆结构参数误差引起的位姿误差;为非几何标定,针对由关节柔度、摩擦、间隙以及连杆柔度等因素引起的误差。在标定过程中,测量是进行参数辨识和补偿之前的重要环节,包括关节位移测量和机器位姿测量。位姿测量方法又包括接触式和非接触式,其中接触式测量对机器人位姿限制较大;非接触式测量中,三坐标测量机只能测量小型机器人,而激光跟踪仪对环境影响较为敏感,同时操作复杂,测量时间长。
4)工作空间:又称工作范围、工作行程,是指工业机器人作业时,手腕参考中心(即手腕旋转中心)所能到达的空间区域,不包括手部本身所能达到的区域,常用图形表示,P 点为手腕参考中心。工作空间的形状和大小反映了机器人工作能力的大小, 它不仅与机器人各连杆的尺寸有关,还与机器人的总体结构有关,工业机器人在作业时可能会因存在手部不能到达的作业死区而不能完成规定任务。由于末端执行器的形状和尺寸是多种多样的,为真实反映机器人的特征参数,工作范围一般是指不安装末端执行器时,可以达到的区域。
综上,执行器是机器人的关键零部件,对机器人的负荷和精度有重大影响。减速器是一种减速传动装置,可以通过降低转速而提高扭矩,以传递较大的负荷,克服伺服电机输出的扭矩较小的缺陷。
从特斯拉的发布会来看,我们预计特斯拉 Optimus 身体关节共有 28 个,包括三种旋转执行器(14 个)和三种线 个)。
特斯拉Optimus 旋转执行器方案猜测:永磁无刷电机+谐波减速器+抱闸+双编码器+力矩传感器+轴承。 采用谐波传感器的优点:小体积,大速比,可达 160:1,扭矩密度比较高。轴向尺寸小,执行器关节轴向可以比较紧凑。在机器人行业,大多数关节都没有集成扭矩传感器,这是从成本,集成难度,刚度损失等方面考虑的。集成扭矩传感器的优势 在于关节更加安全,力控算法更简单。
特斯拉Optimus 直线执行器方案猜测:永磁无刷电机+行星滚柱丝杠+位置编码器 +力传感器+轴承。 采用线性执行器驱动器关节的优势:1)空间利用率高。相比传统旋转执行器分布于关节附近,线性执行器可以纵向布局,最大限度利用腿部内部空间,布置更大更长的电机,提供更大的推动力。2)具备自锁能力。线性执行器的螺杆传动机构通过合理设计可以具备自锁能力,即下半身不动时可以自动锁定姿态,不耗能,形成一个低功耗且稳定的底部支架。3)低能耗,高负载。上肢的肘关节屈伸采用线性执行器的理由和腿部原理一致,低耗能高推力。前臂的两个线性执行器构成并联关节主要目的是降低腕关节的尺寸。纤细的腕关节有两个好处:一是在抓握时降低关节与工件的干涉,提高抓握路径的灵活性;二是降低前臂对视觉构建及视觉位置反馈的干扰,提升控制精度。 采用行星滚柱丝杠,可以输出高精度和高承载能力。行星丝杠的节距可以做的很小, 所以很容易通过小扭矩实现大推力,电机的功率和体积可以小一些。电机的转子集成到了螺母上,整体结构更为紧凑。2.2Kg 的执行器输出可达 8000N,推力密度高。
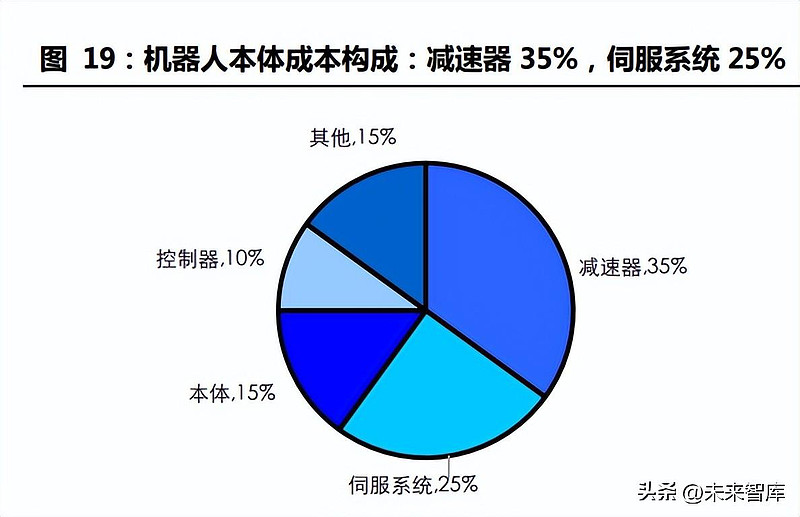
减速器在工业机器人中成本构成占比 35%,价值量最高,预计在人形机器人中价值量依然会占到较高比重。工业机器人的控制过程是:发指令给伺服驱动,驱动伺服电机旋转,通过减速机执行动作,在工业机器人上游的三大部件中,减速器成本占比最高 35%,伺服系统(伺服电机+伺服驱动器)、,分别占比 25%、 10%。
2017~2021 年(谐波+RV)销量从 49 万台增长至 101 万台,复合增速19.8%,工业机器人用销量从41万台增长至84万台,复合增速19.5%。 2021 年占比 82%。2018~2021 年市场规模从 57.7 亿元增至 59.5 亿 元,复合增速 1%,这与国产替代速度加快,均价下行有关。 人形机器人运动执行部件可能采用谐波减速器作为主要的执行部件之一,我们假设人形机器人不同年销售规模,对谐波减速器的需求弹性进行敏感性分析。核心假设: 1)本次测算假设人形机器人年销量在 10~100 万台之间; 2)单台人形机器人配置谐波减速器 14 个; 3)马斯克在特斯拉的开放日上提出,特斯拉人形机器人最终售价将下降到 2 万美金以下,与目前产业链的成本来看,有很大降本空间。我们暂时无法对产业链各环节成本下降的幅度和速度做出假设,我们认为,技术成熟及产业链成本下降是产业化的前提,规模化是技术成熟和成本下降后的必然。
从目前已知的信息来看,人形机器人采用 RV 减速器的概率相对比较小。因此我们不对 RV 减速器进行敏感性分析。预计 RV 减速器未来的主要应用场景还将是在工业机器人上。
哈默纳科是目前世界最大的谐波减速器生产商,全球市场份额超过 80%。谐波传动最初用于美国航天运动控制,谷川齿轮将其引入日本并量产,于 1970 年成立哈默纳科。经过五十余年的技术迭代、海外版图扩张,哈默纳科垄断了全球谐波减速机市场份额,产品矩阵愈加丰富,包括精密减速机(谐波减速器、减速器组件和行星减速器)和机电一体化产品(执行器、)。2021 年哈默纳科营业收入 570 亿日元,2000~2022 年均复合增速 8.3%,与全球工业机器人行业增速基本一致。毛利率稳定在 40%左右,净利率维持在 20%以上。
国内谐波减速器发展迅速,绿的谐波率先打破垄断,同川、大族紧追其后,双环中大力德国茂股份开始入局。我国谐波减速器厂商起步较晚,受益于我国工业自动化对工业机器人的旺盛需求,国产谐波得以快速发展,近年来国产替代脚步加快。 2021 年,哈默纳科占中国谐波减速器 38%的市场份额,相较 2018 年 52%的市场份额显著下降。以绿的谐波为代表的国产谐波减速器份额提升明显,随着行业德蓬勃发展,国内入局新玩家增多,日本新宝、来福份额稳定,同川、大族等企业也占据了一定的市场份额,中大力德、国茂股份、光洋股份也加入竞争,国内产能建设提速。 国产谐波以价换量,高端产品技术突破成为关键。谐波减速器结构简单,在低寿命的要求下门槛较低。疫情下外资厂商供货周期长,国产品牌把握住市场窗口期快速放量,但产品多集中在中低端市场。国内企业依托本土优势可以提供低价谐波,2021 年均价 2000 元左右,哈默那科谐波进口单价多在 8000 元及以上,国内企业以一定的价格优势在销量上表现亮眼。根据 MIR,2021 年绿的谐波、来福减速器销量分别为 17.8 万、9.5 万。

