

杏彩体育:步进电机的概念和分类 基于单片机的步进电机试验
来源:杏彩体育APP下载 作者:杏彩体育官网入口中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和
热线电话: 0574-62199599
产品视频
产品明细
中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°),价格较便宜。
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
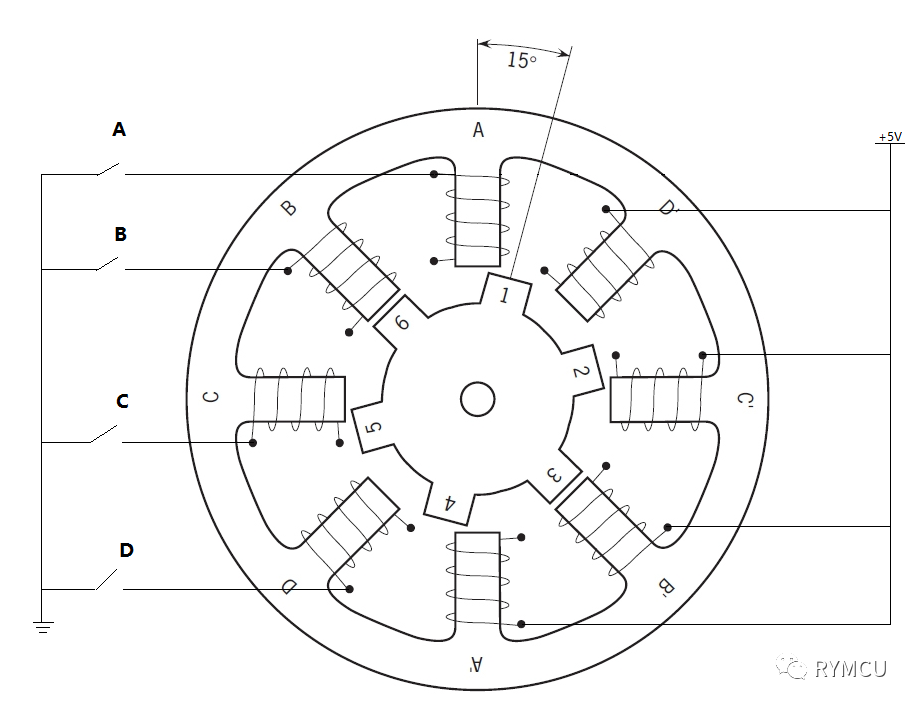
4相步进电机内部结构如上图所示,A,B,C,D四相称为定子,内部1,2,3,4,5,6为永磁铁,称为转子。以转子逆时针旋转为例介绍电机的工作原理。
假设初始状态如上图所示,B闭合,B相绕阻导通,产生磁性将对定子齿轮产生强有力的吸引,使得B对6吸引,B’对3进行吸引,形成如上图所示的初始状态。而此时转子齿轮1将与定子齿轮A形成一个15°的夹角,2与D’之间形成一个30°的夹角。紧接着我们断开B,闭合A相,A对1产生最大的吸引力,A’对4产生最大的吸引力。最终,A与1对齐,A’与4对齐。相当于转子逆时针转动了15°。此时,2与D’之间的夹角由30°变成了15°。紧接着断开A,闭合D,2与D’对齐,5与D对齐,转子将逆时针再旋转15°。接着断开D,闭合C,转子逆时针旋转15°。因此可以总结为:经过B-A-D-C转子旋转了45°。这个过程称为四节拍。旋转一圈360°需要360°/45°=8个四节拍。因此,可以计算出一个节拍旋转的角度为:360°/(8*4)=11.25°。上述工作模式称为单四拍模式。
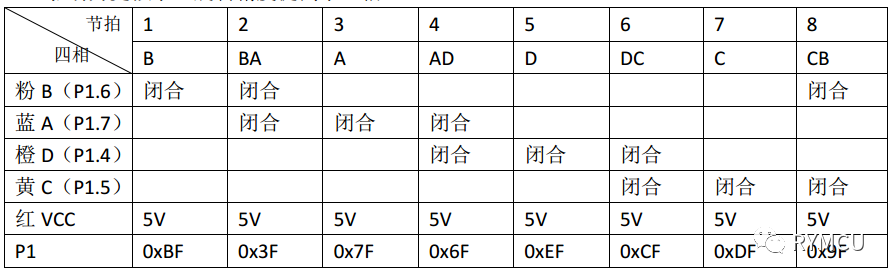
下面在上述的基础之上进行一下改进,假设在两个节拍之间插入一个新的节拍,例如在B断开,A闭合之间插入一个AB同时闭合的节拍,即B-BA-A。此时B对6与A对1具有相同的吸引力,最终将导致6和1之间的中心线将与B和A之间的中心线°。在每个节拍之间插入了一个节拍,即旋转45°由原来的4拍变成了8拍,B-AB-A-AD-D-DC-C-CB。因此,旋转一周360°需要360°/45°*8=64个节拍,每个节拍旋转5.625°。上述模式称为八拍模式,与四拍模式相比,由于增加了拍数使得电机扭矩更大,驱动力更强了,旋转精度提高了一倍。时序如下表所示:
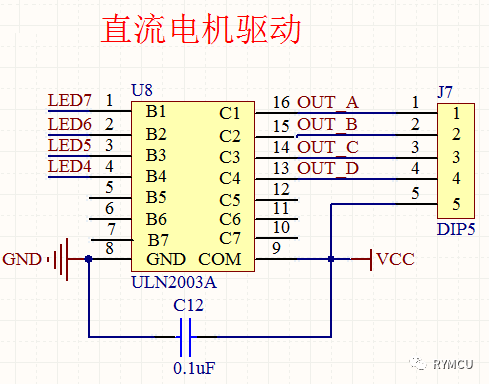
驱动电机需要一定的驱动电流,一般有两种比较简单的驱动电路。一种为使用三极管驱动,一种为采用专用的驱动芯片,我们这里采用的是第二种方法。如上图所示,采用ULN2003A来驱动动直流电机,LED7-LED4为输入端,连接到单片机的I/O口P1.7-P1.4,OUT_A-OUT_D为输出端连接到电机。输入端为高电平时,输出端为高电平,反之亦然。按照上表的时间顺序来驱动电机。那么这里有一个问题大家可能会问,每个节拍的持续时间是多少呢?理论上将节拍持续时间越小电机的转动速度越快。

该电机的参数表中有一个叫起动频率的参数,≥550 P.P.S,表示,在每秒550个脉冲的情况下,电机可以正常启动。相当于每个脉冲,即每个节拍的持续时间大于等于1/550 = 1.8ms的情况下,电机可以正常转动。按照上述学到的相关内容我们接下来就可以使直流电机转起来了。
这里我们利用定时器来实现电机转动的功能,设置一个2ms的定时,每2ms执行一个节拍。根据上面的介绍64个节拍转动一周,一次,转动一周需要2ms*64=128ms,那么可以得到1s可以转7.8周。编写代码如下:
将程序下载到单片机中,连接好电机。电机转起来了,但是好像有点不对劲,得8s左右才能转一圈,和我们预想的不一致。我们回过头来看电机参数表中有一个减速比1:64,速度减为原来的1/64。把这个考虑进去就和我们的现象吻合了。
下面我们写一个程序,让电机转动指定的角度,前面我们讲过转动一圈需要64个节拍,而减速比为1:64,因此,电机实际转动一圈需要64*64=4096个节拍。所以转动angle度所需的节拍数beats = (angle *4096)/360。根据这个公式编写程序如下:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

挺久了的,但是一直只是停留在非常初级的认识阶段,本科的时候上过几门课,但是从来没有自己捣鼓过
的缺点也同样直接,例如需要脉冲信号输出电路;当控制不适当的时候,可能会出现同步丢失现象;由于在旋转轴停止后仍然存在电流而产生热量。
+驱动芯片);相应的数据采集设备(数据采集卡+倾角传感器)。目前通过控制板附带的源程序能够手动控制
控制系统具有成本低、使用灵活的特点,广泛应用于数控机床、机器人,定量进给、工业自动控制以及各种可控的有定位要求的机械工具等应用领域。
` 本帖最后由 松山归人 于 2021-4-8 16:06 编辑 大家下午好!继续接着我们上期没讲完的内容,今天我们继续往下。上期回顾:基于
是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或
、易于控制等优点,已被广泛应用于自动化和精密机械等领域。因计算机具有强大的监控和管理功能,
的应用特别地多,其用途非常广泛,我们这些案例只是涉及其基本部分,没有深究,但是也是要作为一个了解的,今天就学习一下
的状态;F-正转,B-反转;数字越大,转速越大;仿真原理图如下:MCU和LCD1602显示模块:ULN2803驱动
的位置控制、方向控制和速度控制。利用ZLG7290键盘/显示电路,设置给定信号,并显示实际信息
。 PM(Permanent Magnet, 永久磁铁)型转子为内转子型(外部为定子,中间为气隙的

